Innovative Robotic End of Arm Tooling
Geoff Schreiber | 12 June 2013
As a design engineer in the robotic material handling field, I am always looking for new and innovative ways to handle different types of products. About a year ago, I was briefly introduced to a new robotic end effector technology that I thought would be worth spending the time to research and share.
This robotic end of arm tool was the result of collaboration between the University of Chicago, Cornell University, and iRobot Corporation. The individuals leading the research were Hod Lipson, associate professor of mechanical engineering and computer design at Cornell; Heinrich Jaeger from University of Chicago; and Chris Jones from iRobot.
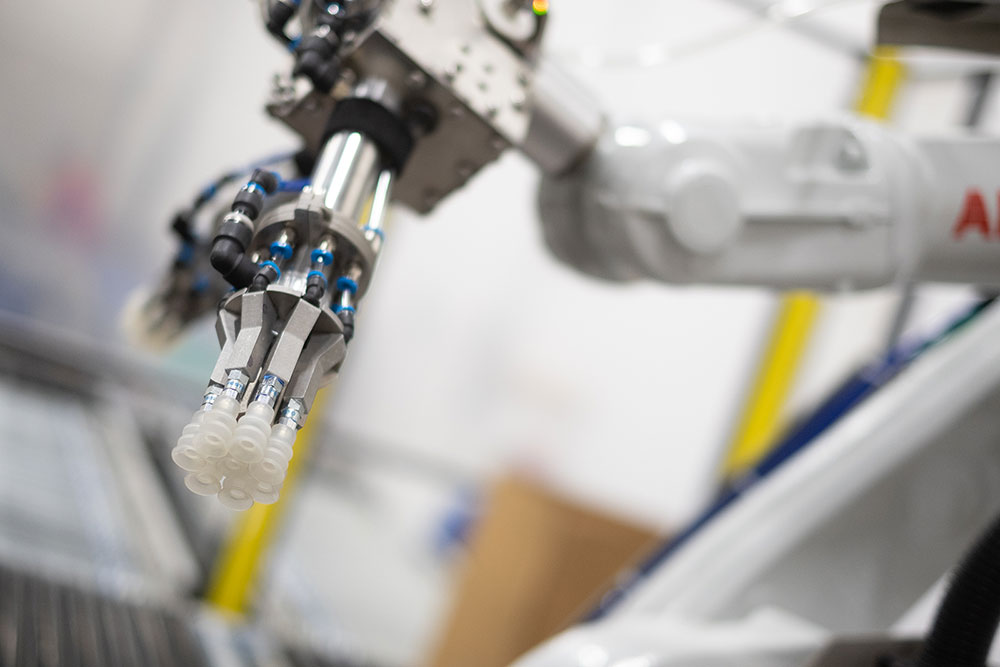
The robotic end effector works using a latex balloon filled with normal coffee grounds that presses down on an object deforming around it. The tool then uses a vacuum to suck the air out of the balloon, solidifying the grip on the object. Next the vacuum releases and the balloon becomes soft again, letting go of the object.
The potential applications for this technology are nearly endless. Some examples would be uses in the military to diffuse bombs or move dangerous objects. These tools could be put on the feet of a robot that could walk on walls or they could be put on the ends of prosthetic limbs. Not to mention the vast options in a factory or manufacturing setting. This universal end effector works through a process called “jamming” in which an uncompressed granular material will be soft and flow freely, but when compressed, will act like a solid.
Think of a vacuum sealed bag of coffee you buy at a store. It is as hard as a brick until you release the vacuum seal. “The ground coffee grains are like lots of small gears,” Lipson said. “When they are not pressed together they can roll over each other and flow. When they are pressed together just a little bit, the teeth interlock, and they become solid.” Its airtight seal allows for uses in wet or volatile environments. It can be used when little information is known about an object before it is to be picked, or when the precise location of the object will not be known.
Geoff Schreiber is the Engineering Manager for Bastian Solutions robotics division in Saint Louis, MO. His role includes leading the engineering efforts of the mechanical, electrical, and automation disciplines for standard and custom projects as well as coordinating the research and development of new robotic technologies such as goods-to-robot bin picking for fulfilment and replenishment operations. A graduate of Southern Illinois University Edwardsville, Geoff has over 20 years’ experience in software and PLC development in addition to technical design direction for mechanical and electrical products, parts, and components for equipment and machinery.
Comments
IT Radix says:
8/28/2018 10:08 AM
This was an awesome article, thank you very much for the info.
landscapes says:
8/28/2018 10:08 AM
This was an awesome blog post, thanks for the information.
plastisol coatings says:
8/28/2018 10:08 AM
Thank you for the professional and effective info.
Leave a Reply
Your email address will not be published.
Comment
Thank you for your comment.